
- >ホーム
上のメニューボタンにマウスを乗せると、サブメニューが表示されます。
経験と知恵を活かした製品開発を続けています。
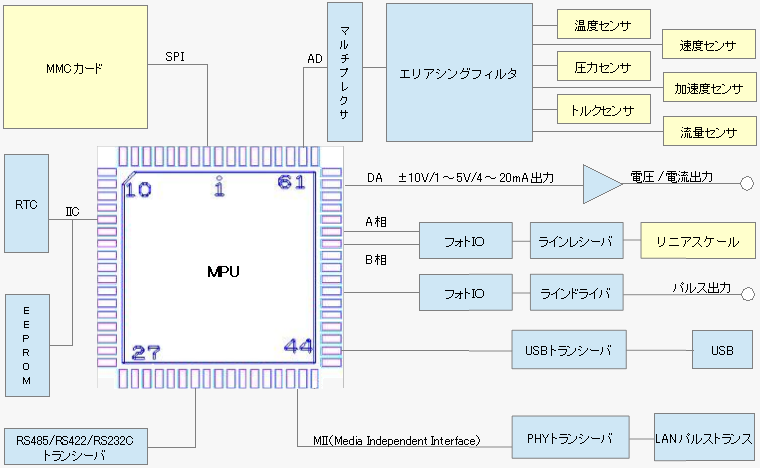
自社で組み込み向けコンピュータボードを設計製作、C言語でソフトウエアを作成します。
PID制御は機械の位置、速度、トルクを制御し、優しいタッチを可能とします。
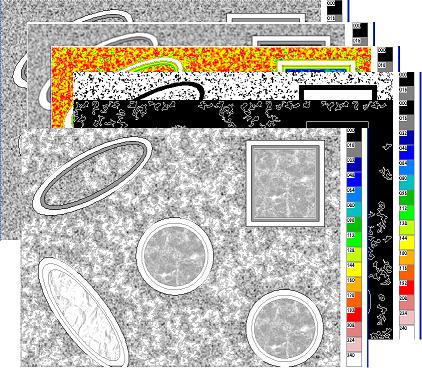
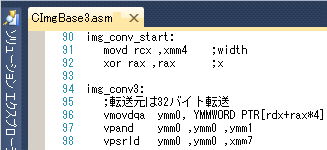
画像処理は画像の粒子解析を行い、また対象物の追跡を行いました。
マップ上に緯度経度、高度を指定してドローンの自動飛行を行いました、ドローン飛行経路3D表示しました。
メニューについて
実 験:実験を通して、実際に実現可能な事、シミュレーションを、ご覧頂きます。
デザイン:設計例、設計する上での理論、理論値、実測値等を記載しています。
コーヒーブレイク:一息リフレッシュ&癒しのために、お気に入りの写真を持ち寄りました。
デザイン:設計例、設計する上での理論、理論値、実測値等を記載しています。
コーヒーブレイク:一息リフレッシュ&癒しのために、お気に入りの写真を持ち寄りました。
|

|
>業務内容 >変動濃度計測システム装置 >油圧トルクテスタ >PC監視モニター >ノイズに強い制御装置 >アナログ回路 会社案内 ≫ご挨拶 ≫製品開発の職務概要 ≫過去の主な業務内容 ≫アクセスマップ |
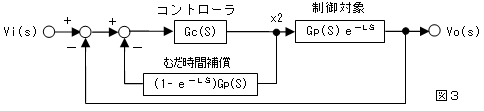
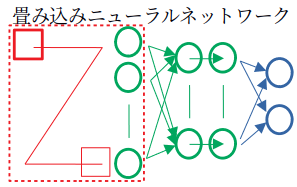
>画像処理基本 >画像処理・処理速度の比較 >PIDむだ時間補償シミュレーション >相似図形の相似係数 >FFT変換 >ドローン自動飛行 >人口知能(AI) |
>低電位差のローノイズ電源 >ローパスフィルタの伝達式 >デジタルFIRフィルタ |
https://course.3hd.co.jp/
三秀電子では、社員の方に実際にプログラム開発担当として参加して頂く形で製品開発を行う
短期間ではありますが、実際にプログラムを作成し、手法を学び体験を積み重ねることで、 プログラム作成部門のスキル向上に貢献できるものと考えています。 ...詳細
製品開発参加型 組込コンピュータプログラム作成入門コース
を開設することになりました。短期間ではありますが、実際にプログラムを作成し、手法を学び体験を積み重ねることで、 プログラム作成部門のスキル向上に貢献できるものと考えています。 ...詳細
>入門コースのホームC言語プログラム作成コース>C言語プログラミング入門>組込PICソフトコース>組込SH2Aソフトコース |

|