- ホーム
- >実 験
- >ドローン自動飛行プログラム作成

|
ウェイポイントに沿った自動飛行と飛行経路表示を行い、GPSの誤差について調査しました。
|
|
ドローンウェイポイント自動飛行アプリを作成しました。サンプルプログラムを改造したものです。
予め設定した飛行経由ポイント(ウェイポイント)に沿った自動飛行運転のテスト飛行を行いました。 |
 |
|
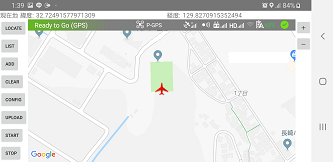
[切替ボタン]をタップすると現在のドローン位置を中心としたマップが表示されます。
|
 |
|
[+][-]ボタンで縮尺を拡大し、ウェイポイント追加用の[ADD]ボタンをタップします。画面をタップしてドローンの飛行経由ポイント(青色)を設定します。
4個のウェイポイントが追加されました。 |
 |
|
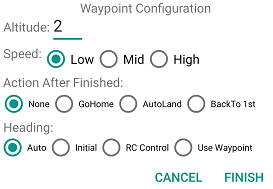
設定用の[CONFIG] をタップして高度、飛行速度、飛行完了後の動作、機首方向を設定します。
Heading のAuto は常に進行方向にカメラが向きます。 |
 |
|
[START]ボタンをタップすると、先に設定した飛行経由ポイントに沿って自動飛行を行います。
その飛行の様子を図示しました。 |
 |
 |
|
マップの表示領域の大きさが分かる枠を追加してゆきます。
|
|
携帯に表示されている領域の大きさを緯度経度から計算するマップアプリを作成しました。
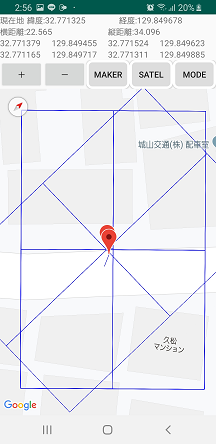
[Maker]ボタンをタップすると表示領域の外周及び中央に下記の枠を表示します。 下記は [Maker]ボタンをタップ後、マップを縮小しています。 |
|
右アプリはマップアプリで真方位、又はマップを回転させ建物に平行に表示領域の大きさを取得したものです。
中心座標の緯度経度(現在地)、
を表示しています。領域の横、縦の長さ 四角領域の四隅の緯度経度
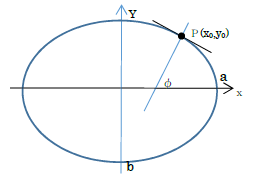
回転楕円体
地球を模擬する場合、回転楕円体とは、楕円をその短軸を軸として回転させた回転体をいいます。
|
 |
 |
|
地理緯度
地球を回転楕円体で近似したときに、右図のようにある地点における楕円面の法線と赤道面とのなす角度を、地理緯度(φ)と
呼びます。一般的な緯度と同一です。
|
 |
||||||||
|
距離の計算
地球の半径としてGRS80を使用しました。
|
国土地理院の距離と方位角の計算ページを使用して検算を行いました。
弊社のライブラリでは浮動小数点doubleを使用しています。アプリの緯度経度の表示桁数を制限するため 四捨五入して小数点以下6桁に制限しています。よって国土地理院の距離計算ページへは小数点以下6桁で入力することになります。
地球の半径は6378137mなので円周は400750kmで与えらえます。
1℃の距離は111320mとなり、小数点6桁への制限による誤差は最大11cmとなります。
また共に、距離の計算結果の表示は小数点3桁です。四捨五入、又は切り捨てを考慮する必要があります。
弊社のライブラリでは浮動小数点doubleを使用しています。アプリの緯度経度の表示桁数を制限するため 四捨五入して小数点以下6桁に制限しています。よって国土地理院の距離計算ページへは小数点以下6桁で入力することになります。
地球の半径は6378137mなので円周は400750kmで与えらえます。
1℃の距離は111320mとなり、小数点6桁への制限による誤差は最大11cmとなります。
また共に、距離の計算結果の表示は小数点3桁です。四捨五入、又は切り捨てを考慮する必要があります。
111320x0.000001=0.11132m
( 0.11132 x (-0.556) = -0.062m、0.11132 x 0.444 = 0.049m )
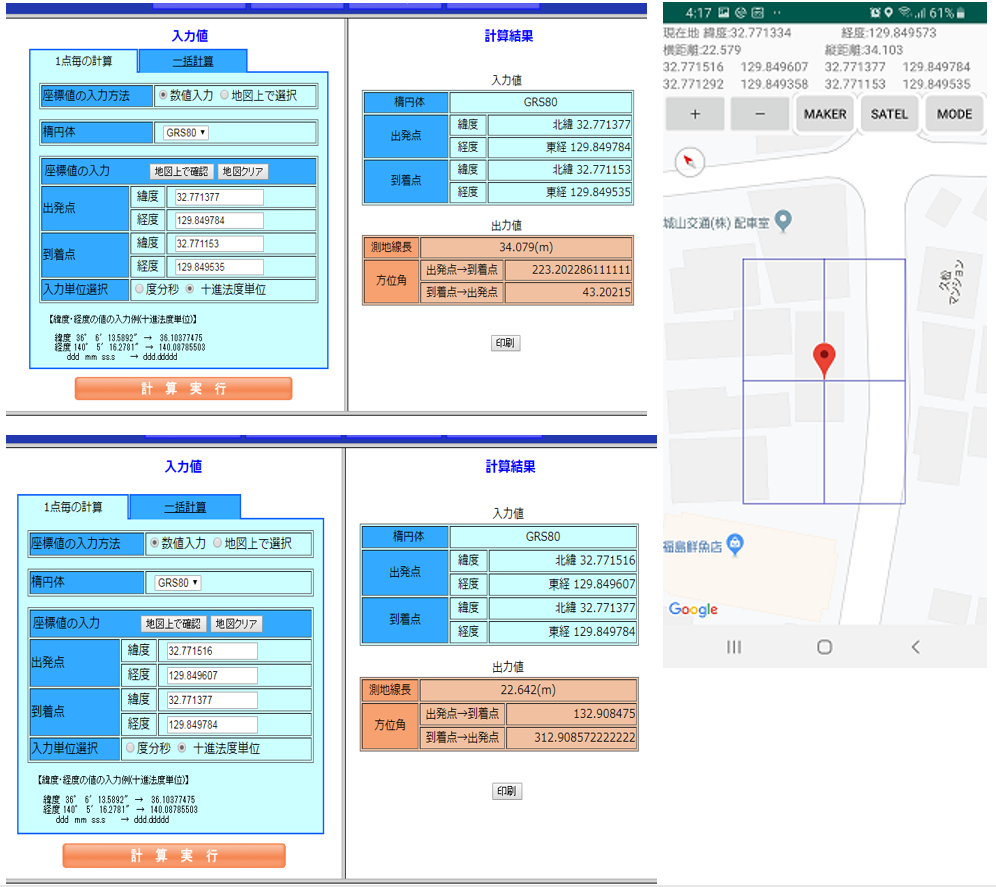 |
| 表示枠 横の長さ | 表示枠 縦の長さ | |
| マップアプリ | 22.579m | 34.103m |
| 国土地理院の距離の計算ページ | 22.642m | 34.079m |
| 誤差 | -0.063m | +0.024m |
|
衛星写真
[SATEL]ボタンをタップすると衛星写真を表示する機能を追加しました。
[SATEL]ボタンを再度タップすると地図表示に戻ります。 |
 |
|
携帯の軌跡
携帯GPSの移動軌跡を表示する機能を追加しました。
[Mode]OFFで軌跡を表示 [Mode]ONで携帯の位置を+で表示します。 |
 |
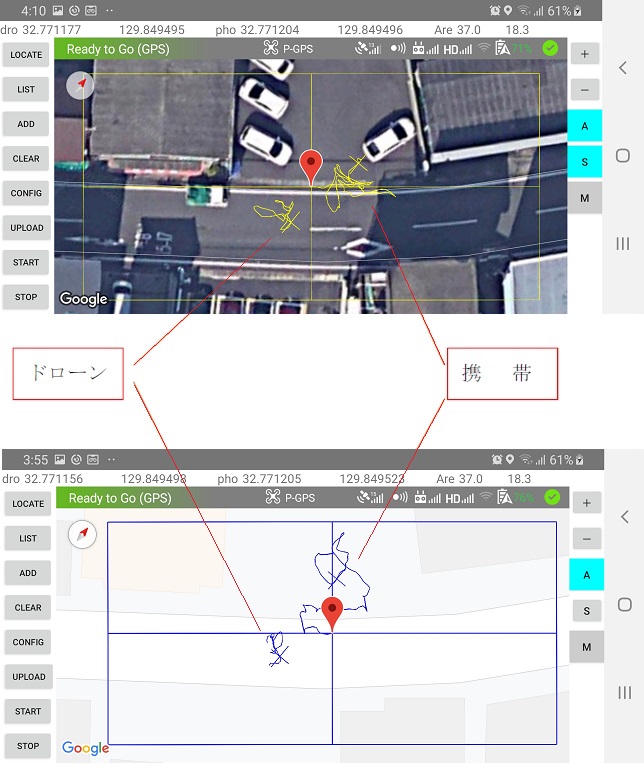
ウェイポイントアプリに表示領域の表示枠、GPSの軌跡などの機能を追加しました。
四角の表示枠が横:37m、縦18.3mです。
ドローンと携帯のおおよその位置が分かるように赤い点を画像に追加しました。
同じ場所にドローンと携帯を5分間置いた場合のそれぞれGPSの位置の軌跡です。
四角の表示枠が横:37m、縦18.3mです。
ドローンと携帯のおおよその位置が分かるように赤い点を画像に追加しました。
同じ場所にドローンと携帯を5分間置いた場合のそれぞれGPSの位置の軌跡です。
|
中央から表示枠外周までの距離が 横:18.5m 横:9mなので
ドローン:4m 、携帯:8m程度 実際の位置よりズレている事が読み取れます。 |
|