- ホーム
- >実 験
- >画像処理基本ソフト
|
実験 >画像処理基本ソフト >画像処理・処理速度の比較 |
カメラ入力の画像から輝度の分布に着目した対象物の検出 粒子解析による大きさ、面積、アスペクト比、主軸角の計測 照明むら補正、濃度変換、疑似カラー表示 対象物の追跡 |
NTSC方式コンポジット映像信号の場合、カラー画像の取り込み時間は、カラー画像2mS、モノクロ画像1mS以下です。
マザーボードD915GAV、Pentuim4、3GHzのスペックで古いPCですが、画像処理を行う時間は十分の能力があります。
システムの構成は、画像処理システムを参照して下さい。
下記に画像処理の基本的な処理に関して、記載しています。
下記に画像処理の基本的な処理に関して、記載しています。
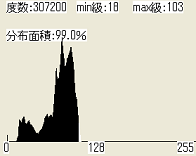
画素数 |
設定輝度レベル以上、以下の画素数を計測。領域別、輝度別の画素数を計測。 例えば、温度を疑似カラーで表示すると、温度が一定値以上のオレンジ色~白色の部分の面積を計算する事が可能です。 |
|||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
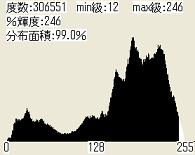
平均輝度 |
指定領域内の平均の輝度を求めます。 | |||||||||||||||||||||||||||||||||||||||||||||||||
輝度変動量 |
定周期毎の輝度の変動量を求めます。 | |||||||||||||||||||||||||||||||||||||||||||||||||
擬似カラー |
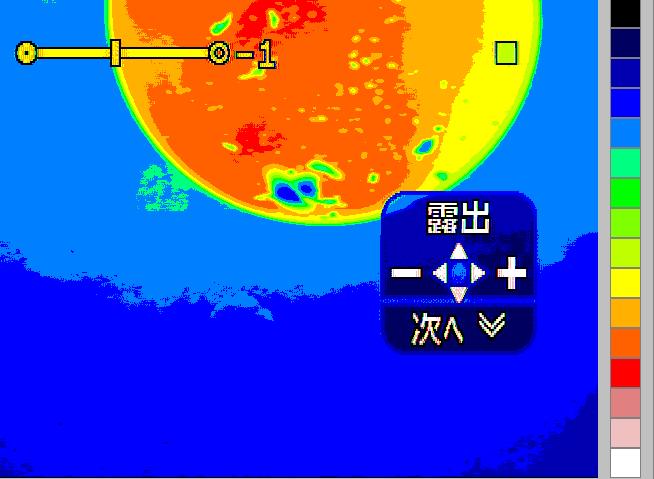
濃淡画像0~255の輝度をn分割し、n分割した輝度の範囲に特定の色を振り分けて表示します。 疑似カラー表示が温度を表すものとすると、右横の黒色が最も低い温度、緑色が中間の温度、赤~白色が高い温度を表します。 |
|||||||||||||||||||||||||||||||||||||||||||||||||
筋本数 |
筋の本数を数える。 | |||||||||||||||||||||||||||||||||||||||||||||||||
筋幅 |
筋の幅を測定する。 | |||||||||||||||||||||||||||||||||||||||||||||||||
フィルタ処理 |
平均空間フィルタ
中央画素強調
ラプラシアン(2次微分)
ソーベルx方向微分
ソーベルy方向微分
ソーベルエッジ強度
e=√(x2+y2) 生画像のノイズの除去、画像のエッジの検出、画像の鮮明化などに使用します。 |
移動平均 |
複数の画像フレームの濃淡を積算し、積算枚数で濃淡を割る処理をリアルタイムに行います。 ノイズの除去に有効。 |
||||||
|---|---|---|---|---|---|---|---|
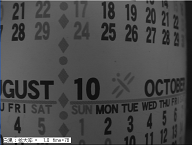
二値化処理 |
カラー画像をグレースケール濃淡画像に変換し、ノイズフィルタを通した後、 濃淡画像の濃度が、ある閾値より以上のものは輝度255(白)とし、未満のものは輝度0(黒)とする処理。 閾値を領域別に指定することもあります。右ダイアログでは、各特徴量と濃度の明るさの分布を表示しています。 |
||||||
ROIの設定 |
計測項目別の領域を設定する(Region of Interest)。 計測したい画面に表示される一部分の領域を、マウスにてドラッグして指定する、又、画面の座標を入力して指定する事が可能です。 |
||||||
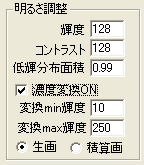
濃度変換 |
|

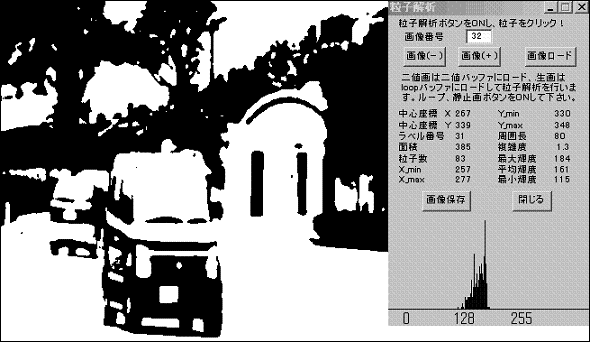
粒子解析 |
黄色の楕円を粒子と見なしています。
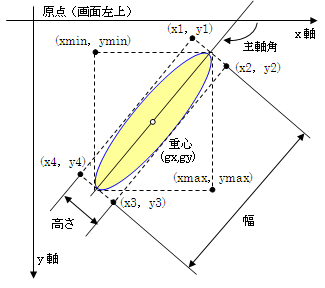
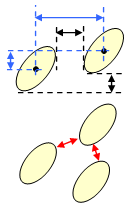
図上の粒子解析特徴量は、下記の通りです。 粒子に外接する四角で囲んだ領域のフェレ座標、フェレ水平長、フェレ垂直長、フェレ中心座標 重心、・で示す座標 粒子中心座標間水平距離、粒子中心座標間垂直距離 粒子重心座標間水平距離、粒子重心座標間垂直距離 外接粒子間水平距離、外接粒子間垂直距離、最短粒子間距離 面積、周囲長、複雑度、粒子内平均輝度、粒子内最高輝度、粒子内最低輝度 主軸角、主軸に沿う幅、主軸に沿う高さ、アスペクト比、占有率。 二値化画像のナンバープレートの面積を粒子解析処理にて求めました。上画面では、面積が385画素数となっています。 画像処理 寸法計測例を参照して下さい。 |
|---|---|
追跡 |
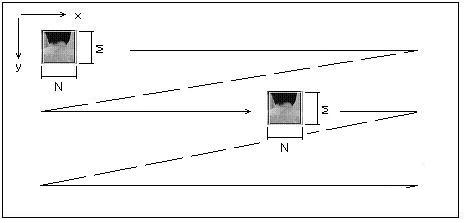 マウスでクリックした座標を中心座標として、ある大きさで周辺の矩形領域をテンプレートとして登録します。 映像を左上から右下にサーチしながら入力映像の中に登録したテンプレート画像と一致する画像を見つけその座標を決定します。 テンプレートマッチングによる追跡処理、基準位置の検出。画像処理 追跡処理を参照して下さい。 |
二次元FFT |
濃淡画像の高速フーリエ変換、高速逆フーリエ変換を行う。 1次元ですがFFT変換を参照して下さい。 |
|---|---|
アフィン変換 |
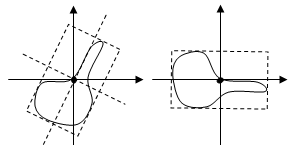
画像の中心座標を中心に画像を回転します。 |
座標変換 |
回転行列を使用して、座標系AのP点を別の座標系Bから見たP点の位置に変換します。 |
Top項目へのアクセス