- ホーム
- >実 験
- >ドローン自動飛行プログラム作成2
|
ドローン飛行経路3D表示!
GPSの誤差を補正して ウェイポイントに沿った自動飛行。
Android Google Map上に3D表示を実施しました。
真上から見た2D表示の場合、飛行高度、離陸時の飛行経路の様子が全く分かりません。 3D表示として、上空よりマップを正面、斜め45度、背面へと回転することにより、 より詳細に飛行の様子を見ることが出来ます。 |
|
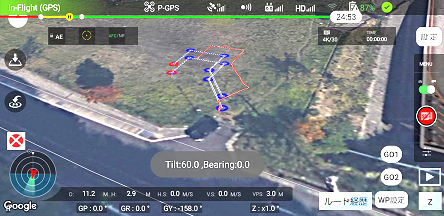
飛行中、カメラ映像とは別に必要に応じて飛行経路をマップに表示することが可能です。
ドローンのGPS信号強度表示、バッテリ残量表示、ビデオ録画停止、ミッション停止等、そのまま操作可能です。 |
|
|
下図は、最終地点が赤丸となっていて、離陸地点と最終地点が同じ場所になっています。 マップ2D上で4点のウェイポイントを設定しその高度を5mにしています。タブレット3D表示に変える ため画面を2本の指で上へ操作します。 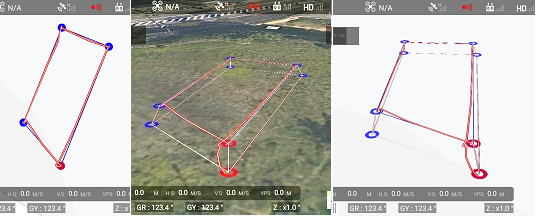
|
|
飛行経路はCSVテキストファイルで保存してあります。
実際の緯度、経度、距離、方位、高度、速度等を確認することが可能です。 |
3D表示例 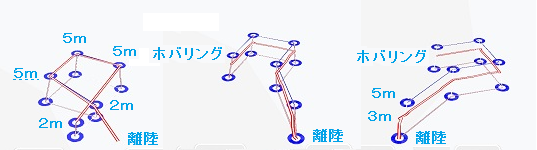
|
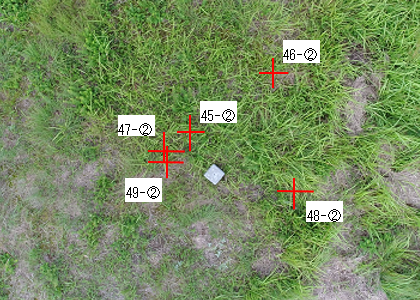
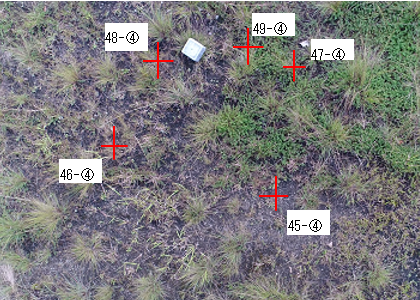
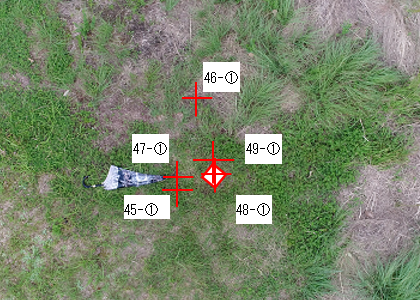
アプリ上で緯度経度を指定しウェイポイントを配置して飛行しますが、実際に飛行した経路が設定通りかを確認しました。
衛星写真上のウェイポイントの緯度経度と同じ場所にセメントブロックを配置、飛行時の映像から飛行がどのように行われたかを確認します。
ジンバルを下方90度に設定、ホバリング時の映像のセンターをドローンの実際の位置として、画角、高度を一定として飛行します。
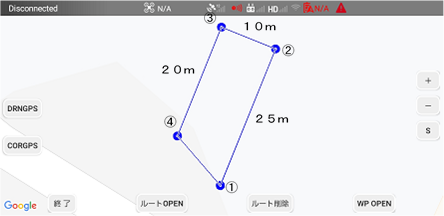
アプリ上でウェイポイントを配置すると、各2点間の距離がリスト表示されます。
衛星写真上のウェイポイントの緯度経度と同じ場所にセメントブロックを配置、飛行時の映像から飛行がどのように行われたかを確認します。
ジンバルを下方90度に設定、ホバリング時の映像のセンターをドローンの実際の位置として、画角、高度を一定として飛行します。
アプリ上でウェイポイントを配置すると、各2点間の距離がリスト表示されます。
|
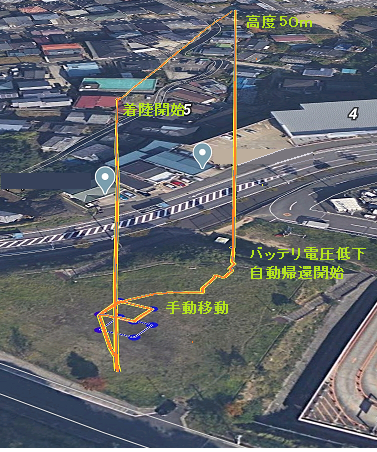
ドローンを毎回同じ位置に置いて、自動飛行を行いました。GPSの誤差が大きいため設定ウェイポイント通りに
飛行しません。
飛行ルート履歴から判断すると約50%の飛行が設定ウェイポイント通りに飛行し、残りの50%が大きくずれています。
GPSの誤差からウェイポイントの位置を誤認しその状態で飛行したものと思います。 飛行ルートを見ると、設定ウェイポイントと平行でない部分があります、飛行中にGPSの誤差が変化しているものと思います。 |
ドローン:phantom4 advanced
青線:設定飛行ルート 赤線:飛行ルートログ(*.CSVファイルで保存) 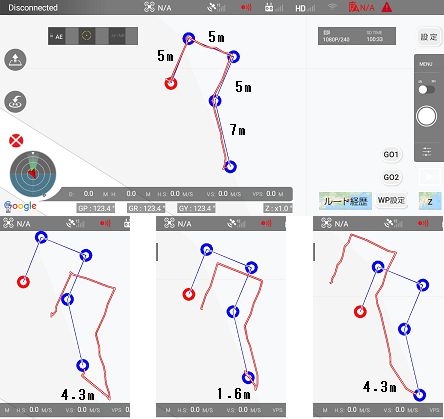
|
|
飛行時のルートの様子です。
|
 |
|
GPSの誤差が大きいので位置補正と言っても若干良くなる程度です、利点はホームポイントから設定進行方向に飛行することです。
予定しない方向へ飛行しないことです。
|
|
ウェイポイントの設定内容です。時間の経過とともにGPSの誤差が変化するので飛行距離を長くしました。
|
 |
|
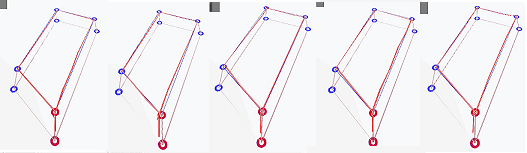
GPSの位置補正を行い5回自動飛行を行いました。ドローンのGPS軌跡は殆ど同じものとなりました。
|
高度:5m、速度:2m/s、ホバリング時間:5s、ジンバル角度:90度
 |
|
一度離陸後に、自動飛行しているので離陸時の飛行経路が途切れています。
|
 |
 |
 |
 |
 |
|
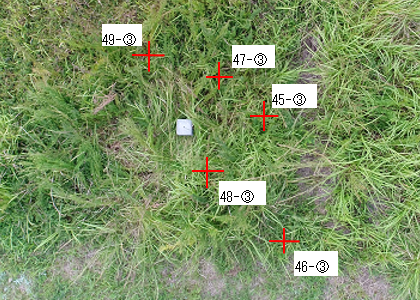
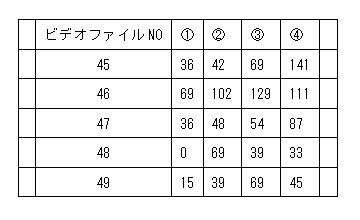
録画映像から実際に飛行した位置を求めるため、ウェイポイント点に配置したセメントブロックからの距離を計測しました。
ドローン位置は、ホバリング中の静止画のセンターとしています。
飛行距離を長くすると、時間とともに誤差が大きくなります。 |
 |